



 A Gantry Robot is an automated industrial system that can also be referred to as a Cartesian Robot or a Linear Robot.
A Gantry Robot is an automated industrial system that can also be referred to as a Cartesian Robot or a Linear Robot.
Gantry robots typically move in linear paths creating a three dimensional cubic envelope of space it can work within.
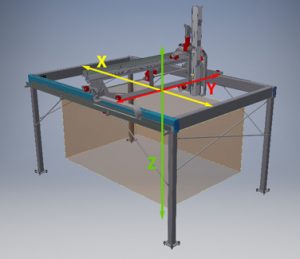
For this reason, the term Cartesian robot is ideal since the overall top-down working space is bound by two linear paths that intersect at right angles to create the working plane (typically referred to as X and Y.) When you add a third axis (typically referred to as Z), this creates the depth at which the end-of-arm-tool can operate inside the cubical envelope. While these three axes are the principle forms of movement, gantry robots may contain as few or as many axes as necessary to perform the required task.
A common option is to add a fourth rotational axis, “U”, to the bottom of the Z beam. This axis rotates the end of arm tool such that the tool stays parallel with the floor. Options exist to rotate the tool in a vertical fashion rather than horizontal.
Sage Gantry Robots use various way systems and mechanical drives. Way systems include wheel & track, profile rail, and wheel & beam. Drive methods include belt, wire rope, tractor, chain, and closed loop friction.

In rare cases, gantry robots are mistakenly referred to as Smart Cranes since they resemble industrial overhead cranes. Gantry robots are not defined as cranes but they do share visual similarities and core concepts. Cranes typically have unsupported z-axis cable or wire rope systems whereas gantry robots offer a rigid mechanical z-axis solution with little deflection and high repeatability. Overhead cranes are manually operated so the term “smart” applies to gantry robots being fully autonomous without the need for operator input.
In being autonomous, gantry robots operate independently of human beings in their workcell and offer precision and accuracy not available to overhead cranes.













